日本科学未来館

東京都江東区にある、日本科学未来館に行って来ました。

これはモーションライドの「駆動装置部」です。
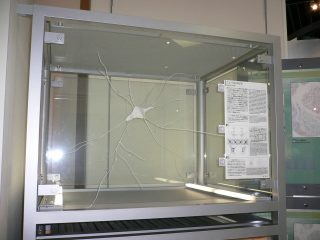
これはミクロでみた脳「ニューロン・モデル」構造模型です。
「ニューロン・モデル」の解説グラフィック (神経細胞のモデル)

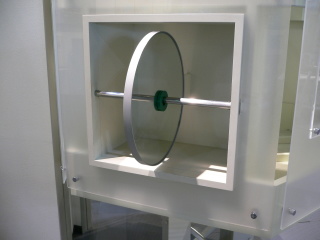
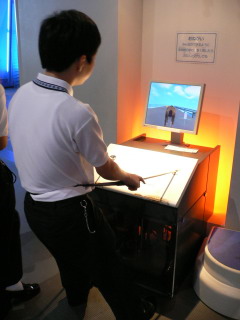
これは「視覚と感覚(幻の腕)」実験装置です。
脳が視覚と体性感覚(体の位置や動きを感じる感覚)の情報を結びつけていることを知る実験装置です。
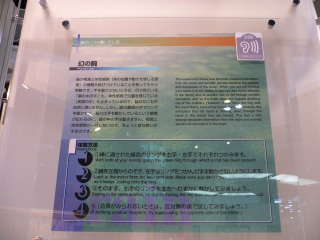
体験方法は
(1)鏡を挟んで棒に通されたリングを右手、左手で それぞれつかみます。
(2)鏡を左側から覗いて左手はリングをつかんだまま動かさないようにします。
(3)そのまま右手のリングを左右へ少し動かします。
結果、脳には右手を動かしている感覚が伝わっているのに、鏡の中の手(左手だが脳は右手と感じている)は動かない
ので変な感じがします。

これはインタロボットです。
通信メディアを使った会話でも、ロボットが身振り手振りを加えて行なうことでリアルなコミュニケーション感が生まれます。

これはインターフェイスのいろいろです。
いろいろなインターフェイスで乗り物を運転します。
たとえば自動車の運転はハンドル以外にもあります。
馬に乗る時には人間は手綱を引きます。

これはスモールフィッシュです。
布でつくられたオブジェをみんなで動かして床に並べます。
光の魚が当ると音がします。
うまく構成するとしだいに音楽に聞こえてきます。

これは時間の壁です。
壁に埋め込まれたカメラは縦線1本分(1次元)しか撮影しません。
これを撮影した時間順に横方向に並べる(2次元にする)と自分の姿が時間とともに投影されます。
普段とは異なった時間の不思議な感覚を感じます。

これは磁気浮上のさまざまなメカニズムです。

「永久磁石と永久磁石」という組み合せの浮上装置です。

浮上の様子と力を自分で確かめられます。

これは電磁誘導を応用した浮上装置です。
スイッチを押して磁石を回転させると、下の導体と反発して浮き上がります。

これは2足歩行研究用ロボット「PINO」のカットモデルです。

これはロボットの「足先の関節機構」(サーボコントローラ)です。
